Technology & Solution
技術・ソリューション
お客様に最高の感動とその先にあるしあわせをお届けするため、熊谷組グループビジョンのもと一丸となって良質な建設サービスを提供し続けます。
ソリューション
-

木材を適切に使うことは、地域の活性化や、森を守ることにつながっていきます。この地球にやさしい建物が、すべての人に価値ある建物となるように、私たち熊谷組は「しあわせ品質」を提供いたします。
-

再生可能エネルギー事業、不動産開発事業及び技術商品販売などに事業者として取り組んでいます。
-

日々の生活や経済活動を支える道路、鉄道、航空船舶、電気、ガス、水道、電信電話、インターネットなど様々な社会基盤を数多く手がけています。
-

発注者の想いの反映、利用者の使いやすさの追求、そして、何より安全で安心して使えること。熊谷組が手がける作品にはこの一貫した考え方が存在しています。
-

熊谷組は「環境ナンバーワン企業」を標榜し、環境保護、環境修復、環境創造など自然と共に歩んできたからこそ可能となる技術があります。
-

災害から人々の生命や生活、財産を守りたい。この強い想いが災害に強い建設物を作る技術、被災からの復旧技術を生み出しています。
-

建設物を建設するだけではなく、建てる前のこと、建てること、建てた後のこと、そして将来のことまで、一緒に考え続けています。
-

アジア各国などでの、交通渋滞・環境汚染等のSDGs課題解決や、経済成長のためのインフラ整備・開発事業、再生可能エネルギーなどの脱炭素化分野、日系企業進出支援などを行っています。
-

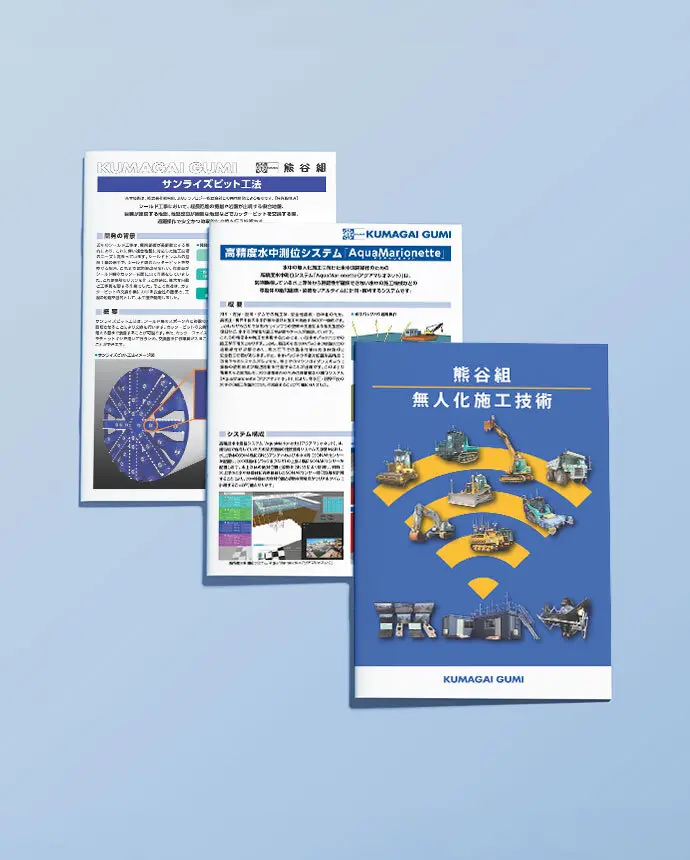
無人化施工の先駆けとして、土木事業の先進的な情報化施工やクラウドアプリケーション開発・実装、建築事業でのBIMの活用など、様々なDXを推進しています。
-

熊谷組では良質な建設サービス業の提供と持続可能な社会の形成に貢献し、熊谷組グループの提案力の強化と建設工事の生産性向上に寄与するべく、技術本部を中心に土木事業本部、建築事業本部、安全品質環境本部と連携して技術開発を進めています。
Technical Research Report
熊谷組技術研究報告
熊谷組技術研究所は、自然と調和した人間活動の場を構築し、社会に豊かさを提供するために、高度で多彩な研究を行っています。
弊社の取組みをより多くの方々に関心を持っていただくため、研究開発成果及び施工報告、社内外の発表論文を掲載し、一年に一度技術研究報告書として発行しております。

土木関連プレスリリースアーカイブ