- プレスリリース
高速高精度運行を可能とする自動走行技術を開発~アーティキュレートダンプを用いた自動運搬作業の実証~
2026年03月25日
株式会社熊谷組(本社:東京都新宿区、代表取締役社長:上田 真)は、AI制御システムを用いて、アーティキュレートダンプトラック(以下、ADTと表記)の自動走行技術を開発しています。今回の実証実験では、一般工事のコンクリート構造物の埋戻しでADTによる材料運搬作業を実施しました。
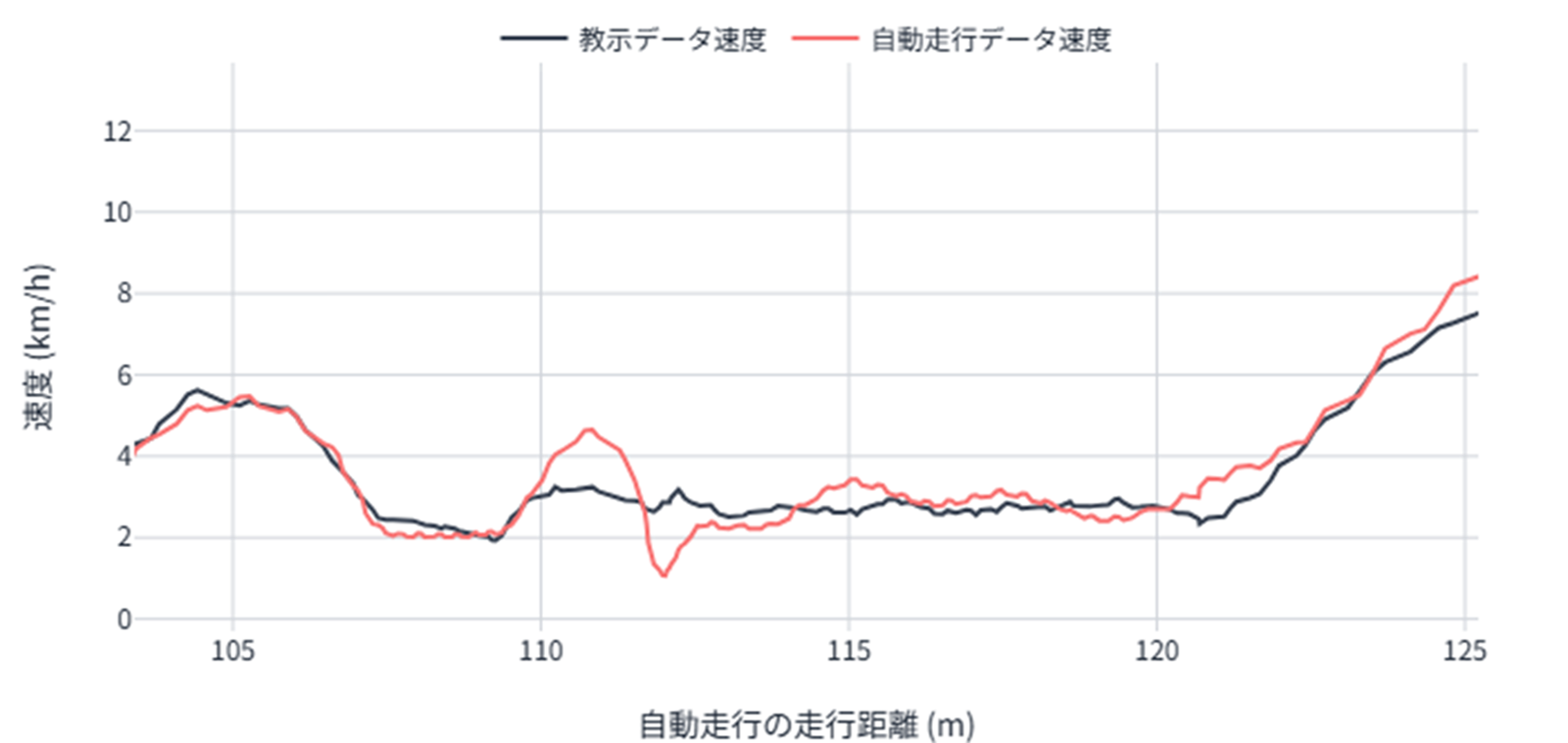
事前にオペレータによる教示運転を行い、その教示された位置、車両速度を基に自動走行を行います。最高速度12.5km/hの教示車両速度に対して、1km/h未満の誤差で自動走行できるという高い速度追従性を確認しました。これにより工事現場の実運用に向いた稼働が期待できます。
1. 開発背景
現在、建設産業では生産年齢人口の減少や高齢化が顕在化しており、業界全体の大きな問題となっています。これに対し、国土交通省が発表したi-Construction2.0では「建設現場のオートメーション化」が掲げられており、抜本的な省人化対策に取り組むために自動施工の普及が求められています。
そこで、運搬機械のなかでも搭乗操作が難しいとされるADTの自動走行を実現できれば、狭隘なトンネル現場から大規模なダム現場、そして軟弱な地盤が課題となる災害復旧現場など幅広い工事に活用することができ、施工効率の向上が期待されます。
2. 実証実験
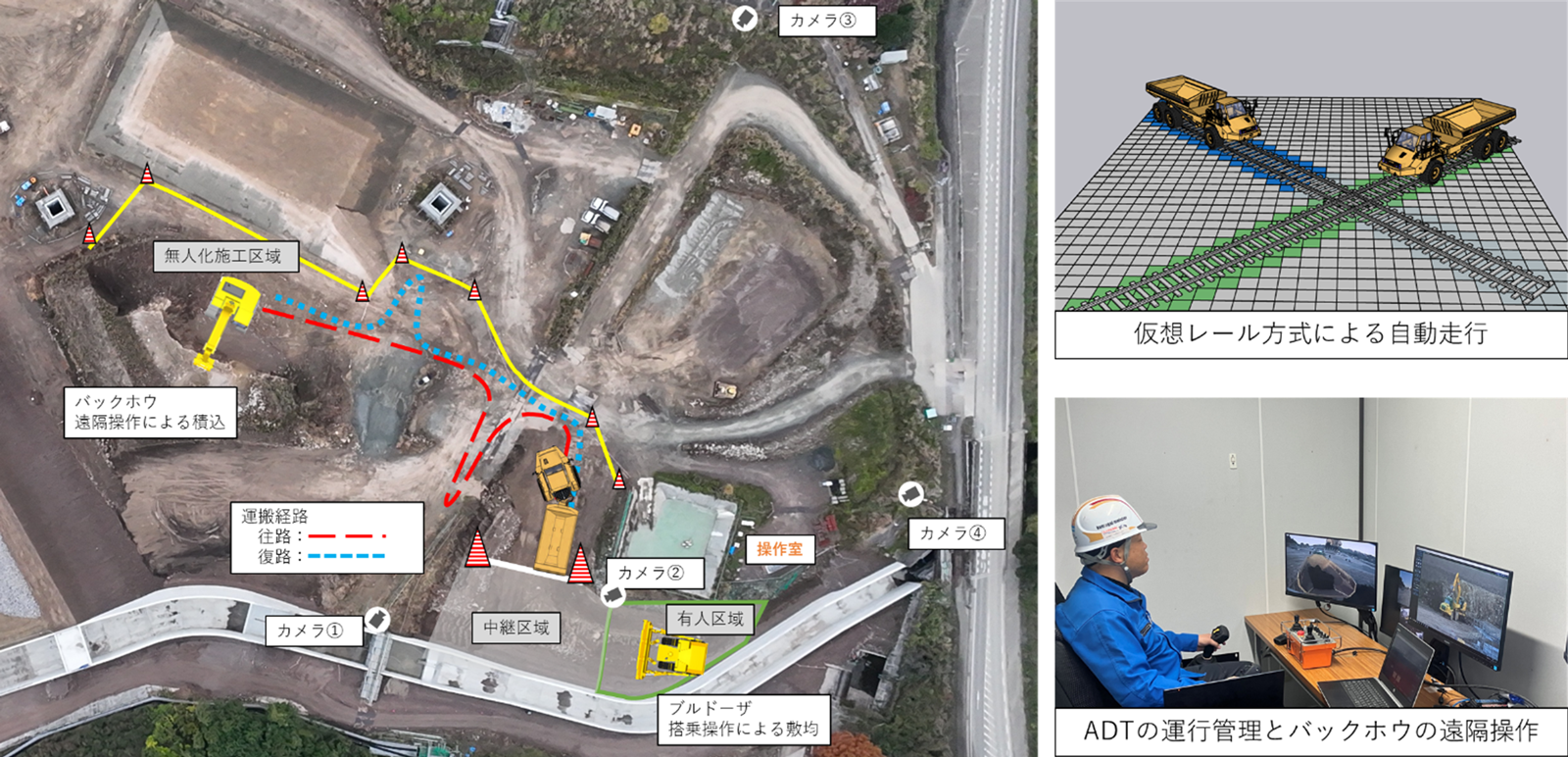
今回、自動走行型ADTを用いてダム現場における構造物の埋戻し作業を実施しました。この作業では、ADT1台とバックホウ1台(遠隔操作)、ブルドーザ1台(搭乗操作)の計3台を使用しました。
実証実験に際しては、国土交通省が策定した自動施工における安全ルールに基づき施工エリアの区分けを行いました。バックホウとADTが稼働するエリアを無人化施工エリア、搭乗操作のブルドーザの待機場所を有人エリア、そして材料の荷卸場であり敷均しエリアとなる場所を中継区域として設定しました(図1)。現場のカメラを監視しているバックホウのオペレータからブルドーザのオペレータに向けてトランシーバーにより中継区域に入って良いタイミングを指示し、敷均しを行いました。
この材料運搬作業では現場の実運用を見据え、走路の轍を整えることなく稼働することを前提としたときに限られたエリアでのスイッチバックによる方向転換の難しさが課題でした。
3. 特徴
- 仮想レール方式による経路決定
自動走行型ADTは、オペレータの教示運転により経路を設定します。実際に走行した際の経路と速度を、目に見えない「仮想のレール」として、自動走行に反映する仕組みです。これにより、現場の路面状況や周辺の施工状況に合わせた教示通りの速度での安全な走行が可能になります。教示時に人の判断が介在することで、時々刻々と変化する現場環境でも、人が環境に合わせた運転をしているため、柔軟にかつ迅速な運用を実現しています。 - スイッチバックの適応
狭隘な工事現場では、単純な前後進の走行だけではなくスイッチバックによる方向転換が必要になります。これをADTで実現するためには、アーティキュレート構造(中折れ式)の旋回角度をセンサにより取得し、教示経路に対する前方車体と後方車体の位置姿勢を常に認識し続けることで、旋回を含む経路に対応した走行を実現できます。 - 経路追従性の高精度化
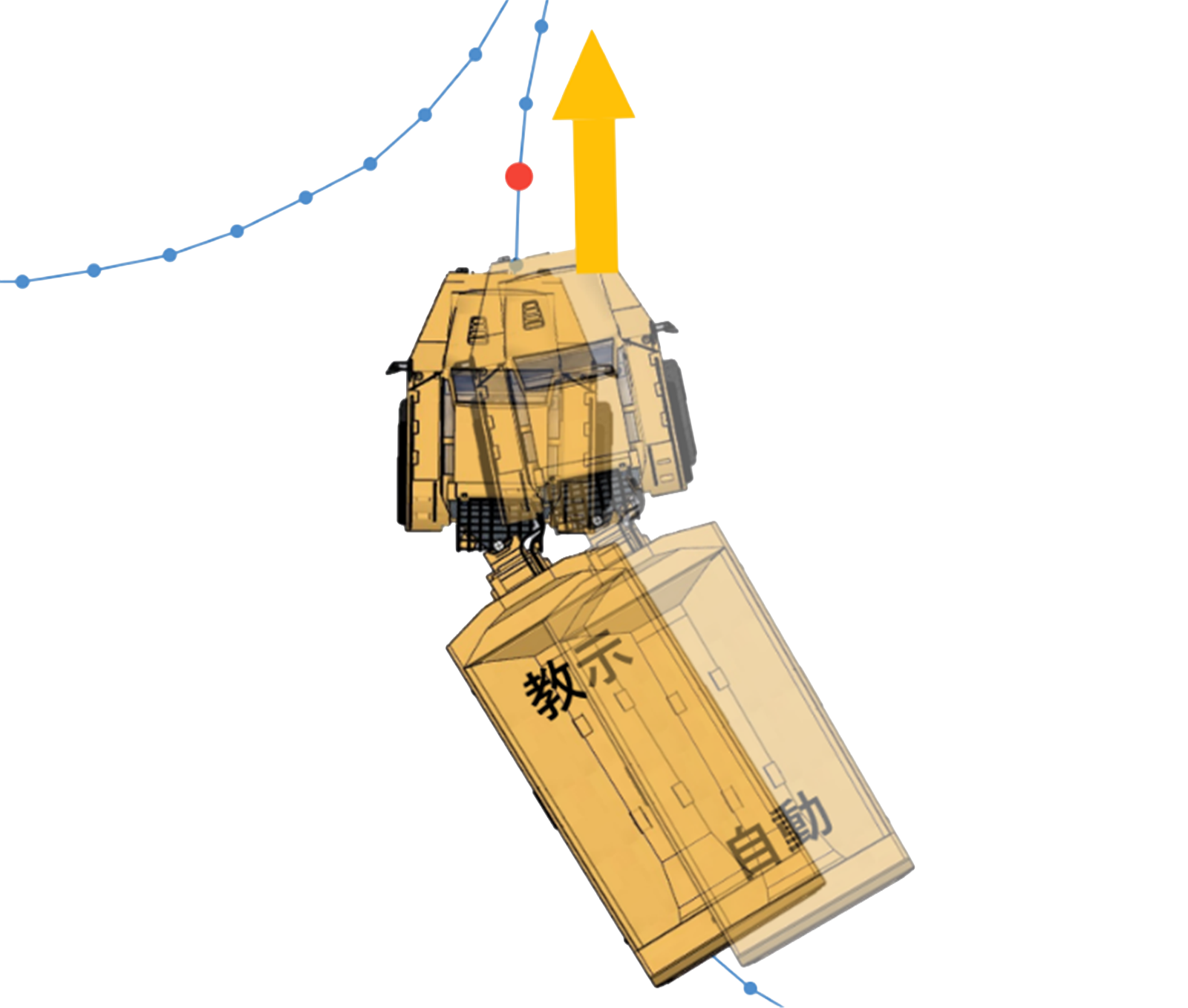
教示運転と自動走行の双方でGNSSから取得した走行軌跡を基に走行精度を比較することで、走行制御状態を可視化するソフトウェアを開発しました。図2の青線で示す教示経路に対して、車両の位置・姿勢、どのような制御情報が送られていたかを確認することができます。この制御状態可視化ソフトを用いて車両の制御を細かく調整することで、経路追従性の高精度化を図ることが可能となります。
4. 実験結果
- 教示の速度に対する自動走行時の車両速度
今回の材料運搬作業では、オペレータの遠隔操作による教示運転で最高速度12.5km/hとなりました。この教示データを用いた自動走行では、教示走行速度に対して平均速度差-0.85km/hという高い速度追従性を示しました。図3に教示走行時の車両位置と自動走行時の車両位置との経路上同一地点での速度差を比較した図を示します。
5. 今後の展望
今後は、走行中の車両の挙動をマルチモーダルに学習し、滑らかな走行経路となるように車両制御するフィジカルAIを取り入れることで、さらなる一人当たりの生産性向上に寄与する技術として発展させていきます。
さらに、仮想信号式車両運行管理システム※を用いて、複数台の車両運行管理を行い、さらなる現場への導入を図っていきます。
- アーティキュレートダンプトラックの複数台運行管理を実現する次世代AI仮想信号式制御システムの開発を進めています(2025年8月20日プレスリリース済み)。
お問い合わせ先
本リリースについてのお問い合わせ先
株式会社熊谷組 経営戦略本部広報部
電話:03-3235-8155
技術に関するお問い合わせ先
株式会社熊谷組 土木事業本部土木技術統括部土木DX推進部
https://www.kumagaigumi.co.jp/contact/tech-solution/※
- 社外HPの技術に関するお問い合わせフォームURL