- プレスリリース
バックホウの把持機能を柔軟にする遠隔操作用ロボットハンドの公開実験を実施
2025年08月07日
株式会社熊谷組(本社:東京都新宿区、代表取締役社長 上田 真)は、ムーンショット型研究開発事業「CAFEプロジェクト」(筑波大学 永谷圭司教授)の一環として、建設ロボットの革新的な新技術に関する公開動作実験を2025年8月7日に実施しました。
つくば市にある技術研究所にて、建設機械にスイス連邦工科大学チューリッヒ校(ETHZ)と共同で災害対応の効率化を進めるロボットハンドを搭載し、その柔軟な把持能力を披露しました。本技術は自然災害発生時の迅速かつ安全な応急復旧作業の実現に大きく貢献するものです。
1. 目的
近年、激甚化・頻発化する自然災害現場における応急復旧作業では、作業員の安全確保と作業の迅速化が社会的な重要課題となっています。こうした課題解決のため、災害現場などの過酷な環境で活躍できる建設ロボットシステムの研究開発を進めています。
特に、がれきや災害対応機器など、形が定まらない対象物を安全かつ確実に取り扱うには、柔軟で繊細な把持機能が不可欠です。従来の建設機械の把持機構(グラッパ)は、重い物を掴むことには長けていましたが、複雑な形状や壊れやすい物体の取り扱いには適していませんでした。
この課題に対し、当社は令和6年度より、CAFEプロジェクトの一環として、ETHZのRobert Katzschmann教授との国際共同研究を開始し、最先端のロボットハンド技術を建設機械に統合化した災害対応システムの構築に取り組んでいます。
2. システム構成
本公開実験で披露する技術のシステム構成は以下の通りです。
ロボットハンド技術
ETHZが開発した複数の指をワイヤで駆動させる構造を持つロボットハンドです。
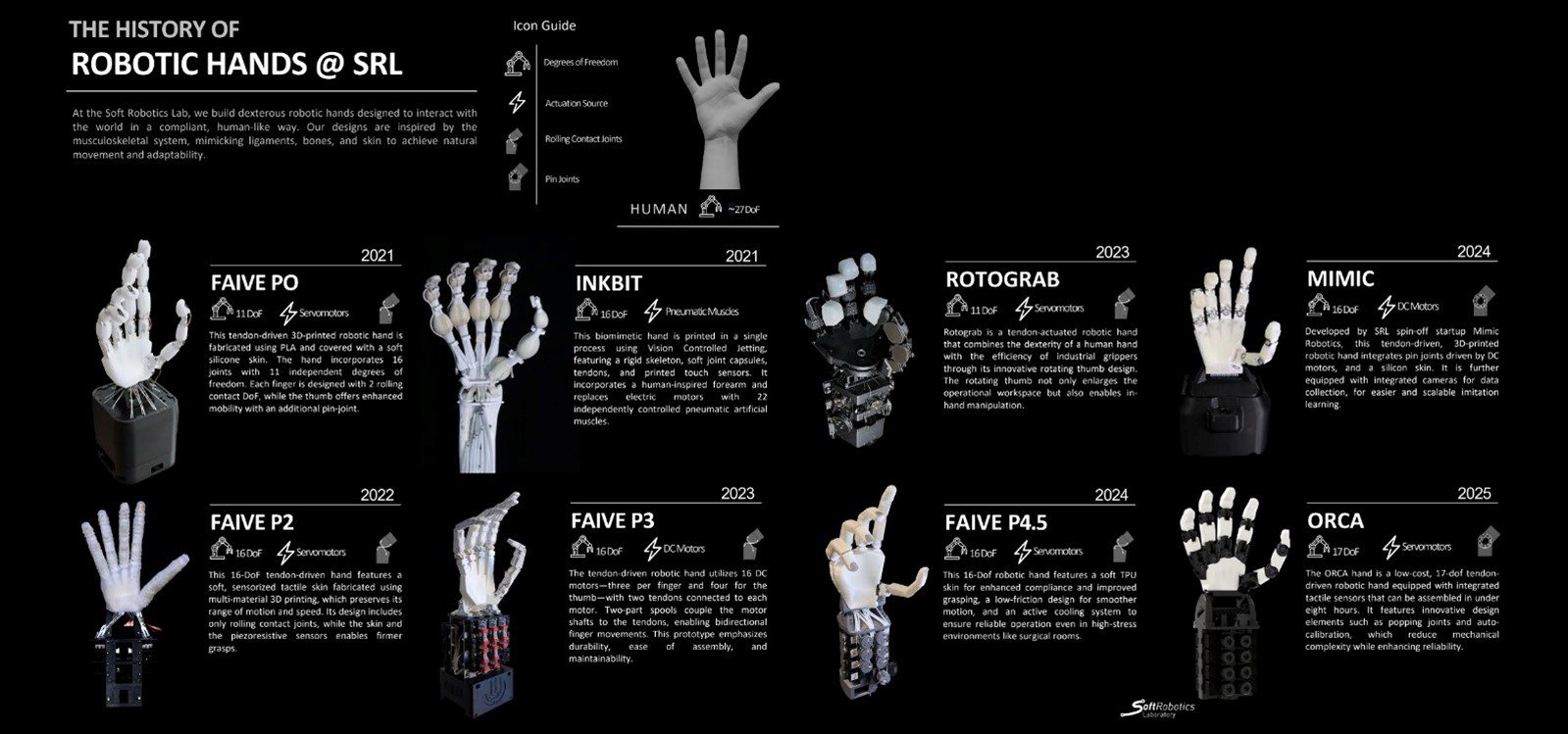
四本の指を用い、対象物の形状に合わせて包み込むように柔らかく把持できる点が特徴です(写真-1)。2021年ごろからハンドの開発が始まり、機能向上やサイズの巨大化などを進めておりました(図-1)。

建設ロボット(バックホウ)
当社が開発を進める遠隔操作可能な小型建設ロボットです。
災害対応を目的としており、クローラ部が水に浸かっても稼働可能な設計となっています。バケット部にロボットハンドやフォークグラブを取り付け、自由度と剛性を追加することで把持機能を向上させています(写真-2)。

今回の共同研究として、熊谷組のロボットの機構面での効果のまとめは以下となります。
- 2自由度を追加による操作性向上
- 建設機械本体への搭載によるその剛性や力を発揮する構造の提供
- 爪先の交換によるロボットハンドへの新たな仕組みの提案
さらに上記のロボットハンドへの対応の他、共同研究全体への貢献として
- 共同研究において、長年の無人化施工の経験や災害対応での実績を活かすこと
- 無線通信技術など実用化するためのノウハウの提供
- 大学などでは実現しにくいフィールド実験環境の提供
があげられます。
3. 実証実験
今回の公開実験では、ロボットハンドにワイヤ駆動式の柔軟な構造を持たせて、従来のグラッパでは難しかった不定形のがれきや電線やホースなどを安全かつ確実に把持できることを実証します。
2025年3月に動作確認を行ったプロトタイプ2号機から大型化したプロトタイプ3号機(手のひらの約3倍サイズ)の実用性を検証しました(写真-3)。

4. 今後の展開
本研究開発の成果によって、将来の災害対応におけるバックホウの作業を効率的に行うことができます。
今後は、社会実装を目指し、より高度で自律的な災害復旧ロボットシステムの実現に向けた研究開発を継続します。
お問い合わせ先
本リリースについてのお問い合わせ先
株式会社熊谷組 経営戦略本部
広報部 電話:03-3235-8155
技術に関するお問い合わせ先
株式会社熊谷組 土木事業本部
土木技術統括部 土木DX推進部