- プレスリリース
複数台が連動するシンクロアスリートを用いた遠隔地からの建設機械の操縦に成功~八王子からつくばへ~
2025年03月12日
株式会社熊谷組(本社:東京都新宿区、代表取締役社長 上田 真)は独立行政法人国立高等専門学校機構東京工業高等専門学校(東京都八王子市、校長 樋口 聰:以下、東京高専)と共同で、建設機械の運転席からの360度映像と音に加えて、傾き、振動、映像を複数台のシンクロアスリートへ同期配信し、東京高専に設置された1台をコクピットから、つくば市にある建設機械の遠隔操作に成功しました。
これにより、全国各地からリアルタイムに建設機械を操縦しつつ、短時間でオペレータの交代が可能になります。
1. 目的
自然災害現場での施工に対する二次災害を防止するため、無人化施工が有効な技術として認識されています。無人化施工はオペレータが遠隔地から建設機械を操縦できるように車載カメラや無線通信機器を組み込んで開発されました。さらに東京工業高等専門学校が開発したシンクロアスリートを導入するために、建設機械に高解像度カメラや加速度センサを取り付けました。遠隔操作室にあるコクピットで運転席からの映像だけでなく、建設機械の傾きや振動が再現されます。視界情報、音情報、振動情報をリアルタイムに操作室側に反映することで、本物の建設機械に搭乗しているかのように、無人化施工を実現できます。
今回、建設機械1台に対して、八王子市にある東京高専のシンクロアスリートのコクピット1台と、80km以上離れたつくば市にある技術研究所のコクピット1台とをインターネット回線で同期させ、東京高専から遠隔操作を実施しつつ、2台同時に建設機械の搭乗感覚を共有できるようにしました。
2. システム構成
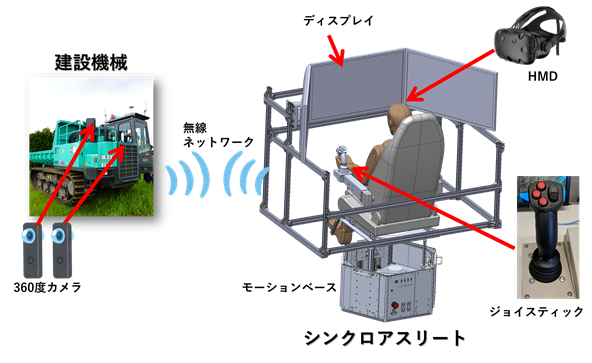
建設機械の動きを再現するシンクロアスリートは、3軸の自由度を持つモーションシミュレータを土台としています(図-1)。ヘッドマウントディスプレイ(HMD)を装着したユーザが搭乗し、建設機械からの加速度情報に合わせてモーションベースの傾きが制御されます。無線ネットワークを通じて同期した360度映像がヘッドマウントディスプレイ上で再生されます。建設業界の他、スポーツ分野でも活用されてきました。建設機械とは無線ネットワークを通じて連携しています。
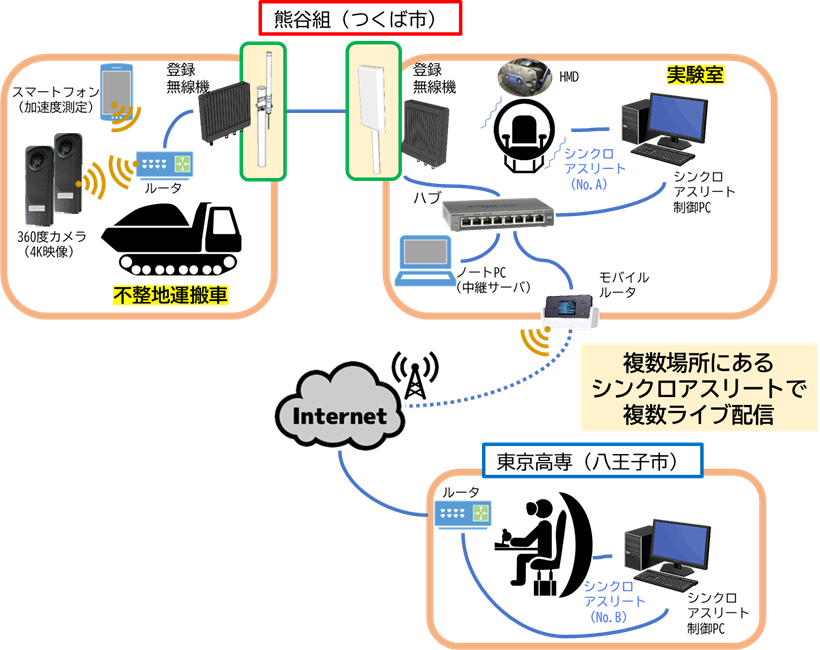
熊谷組技術研究所(茨城県つくば市)の屋外実験ヤードに不整地運搬車を用意し、実験室にシンクロアスリート1台(No.A)を設置しました。さらに東京高専(東京都八王子市)の屋内にもシンクロアスリート1台(No.B)を配置しました(図-2)。不整地運搬車に設置した360度カメラからの4K映像と音声、スマートフォンからの加速度情報が、建設機械上の登録無線機からパケットとして送信されます。
実験室側の登録無線機で受信されたパケットが熊谷組内部のネットワークを経由して、実験室にあるNo.Aのシンクロアスリートの制御PCに届き、コクピット側で不整地運搬車の動きが反映されます。
モバイルルータ経由で4K映像と加速度情報がインターネット回線で東京高専(八王子市)の屋内にあるNo.Bのシンクロアスリートの制御PCに届き、No.Aと同じ4K映像や周囲の音声情報が再生され、コクピットが振動して傾きます。今回、不整地運搬車の遠隔操作は東京高専側のシンクロアスリート(No.B)側で行いました。
3. 実証実験
2024年12月下旬に実証実験を行いました(図-3)。
東京高専にいるオペレータがシンクロアスリート(No.B)のコクピットに搭乗しながら、熊谷組の屋外実験ヤードにある不整地運搬車を遠隔操作しました。HMDで360°映像を見ながら、操縦中に建設機械の音、振動、傾きを感じ取ります。ほぼ同時刻において熊谷組の実験室にあるシンクロアスリート(No.A)でも搭乗者が建設機械の動きを体験できました。No.A側のシンクロアスリートはインターネット環境があれば場所を選びません。不整地運搬車と東京高専にあるコクピット間の映像などの時刻差を計測したところ、平均0.53秒であることを確認しており、安定した遠隔操作を実現しています。

4. 今後の展開
2024年6月のプレスリリースと比較して、今回は東京高専側にあるシンクロアスリートのコクピットからも遠隔操作ができるようにシステムをアップデートしました。オペレータのいる場所を選ばず、瞬時に他の場所にいるオペレータに操縦を交替することが可能となります。遠隔地の工事現場に配置された不整地運搬車などの建設機械に対し、シンクロアスリートを使って安全かつ低遅延に制御するシステムの発展を今後も継続します。
お問い合わせ先
本リリースについてのお問い合わせ先
株式会社熊谷組 経営戦略本部 広報部 電話:03-3235-8155
東京工業高等専門学校 総務課総務企画係 電話:042-668-5111(代表)
技術に関するお問い合わせ先
株式会社熊谷組 土木事業本部 土木技術統括部 土木DX推進部 電話:03-3235-8653
東京工業高等専門学校 総務課総務企画係 電話:042-668-5111(代表)