- プレスリリース
河道閉塞の応急復旧作業を目的としたロボットシステムの公開実験を実施
2025年07月10日
株式会社熊谷組(本社:東京都新宿区、代表取締役社長 上田 真)は、ムーンショット型研究開発事業「CAFEプロジェクト(PM:筑波大学 永谷圭司教授)」の一環として、河道閉塞の二次的な被害を防止する技術の開発に取り組んでいます。
本研究開発プロジェクトでは、ヘリコプターで分解せずに運搬可能な小型の建設機械を遠隔操作し、河道閉塞の応急復旧作業を行うシステムの開発を進めています。今回は、九州大学伊都キャンパスに設けた河道閉塞の模擬環境において、7月10日(木)に公開実験を実施します。
本技術は河道閉塞発生時の迅速かつ安全な応急復旧作業の実現に大きく貢献するものです。
1. 目的
近年、激甚化・頻発化する自然災害現場における応急復旧作業では、作業員の安全確保と作業の迅速化が社会的な重要課題となっています。
ムーンショット型研究開発事業では、自然災害の中でも、特に斜面崩壊などで川の水の流れが堰き止められることで発生する河道閉塞に着目しました。この状況を放置すると、川の上流部分に水が溜まり、やがて閉塞箇所が決壊することで、下流の広範囲に二次的な被害拡大の危険性があります。従って、上流部の湛水箇所から下流に水を流す排水作業の迅速な対応が求められます。従来、河道閉塞の応急復旧作業では、作業員が0.4~0.5m3級の大型の建設機械に搭乗し、機械を直接操作して排水ポンプを設置し、排水作業を行っていました。
しかし、建設機械が排水ポンプを吊りながら水際の斜面に接近し、潜水士によって吊り下げたワイヤーから排水ポンプを切り離す作業には危険を伴い、山間部などへは大型の油圧ショベルを分解して運搬する必要があるため、迅速な初動対応が困難な課題がありました。
そこで、当社は令和3年度より、ムーンショット型研究開発事業へ参画し、ヘリコプターで分解せずに運搬可能な小型の建設機械を遠隔操作し、大型の建設機械と同等以上の性能を発揮し、排水作業を可能にするロボットシステムの開発に取り組んでいます。
2. システム構成
本公開実験で披露する技術のシステム構成は以下の通りです。
建設ロボット(油圧ショベル、不整地運搬車)
当社が開発を進める遠隔操作可能な小型建設ロボットです。災害対応を目的としており、クローラ部が水に浸かっても稼働可能な設計となっています。
油圧ショベルのアタッチメントにはロータリーフォークを使用しています。ロータリーフォークとは、チルト機構と全旋回機構を備え、円筒形の長尺物から角材など様々な形状の物体を掴んで移動させる作業が可能です。小型建設ロボットは固定カメラ、車載カメラ、ドローンの映像を基に遠隔操作をします。
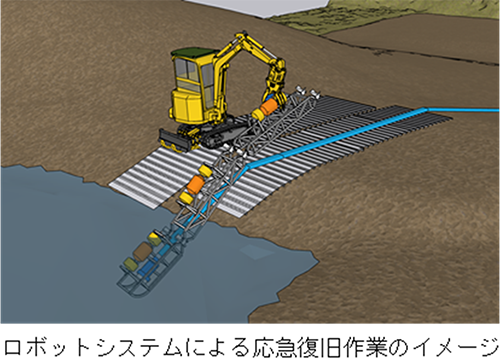

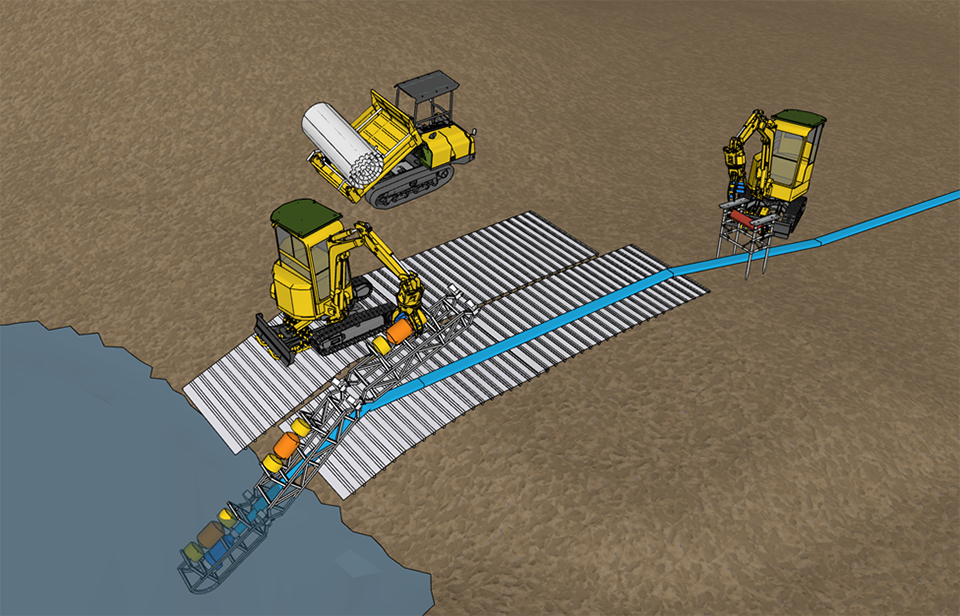
河道閉塞発生直後の応急復旧システム
応急復旧作業では、走行路補強マットの敷設、ポンプの設置および送水、ホースの暴れを防止するための杭の設置を行った後、排水作業を実施します。
今回の公開試験では、特に重要な走行路補強マットの設置、ポンプの設置と送り出しを実施します。
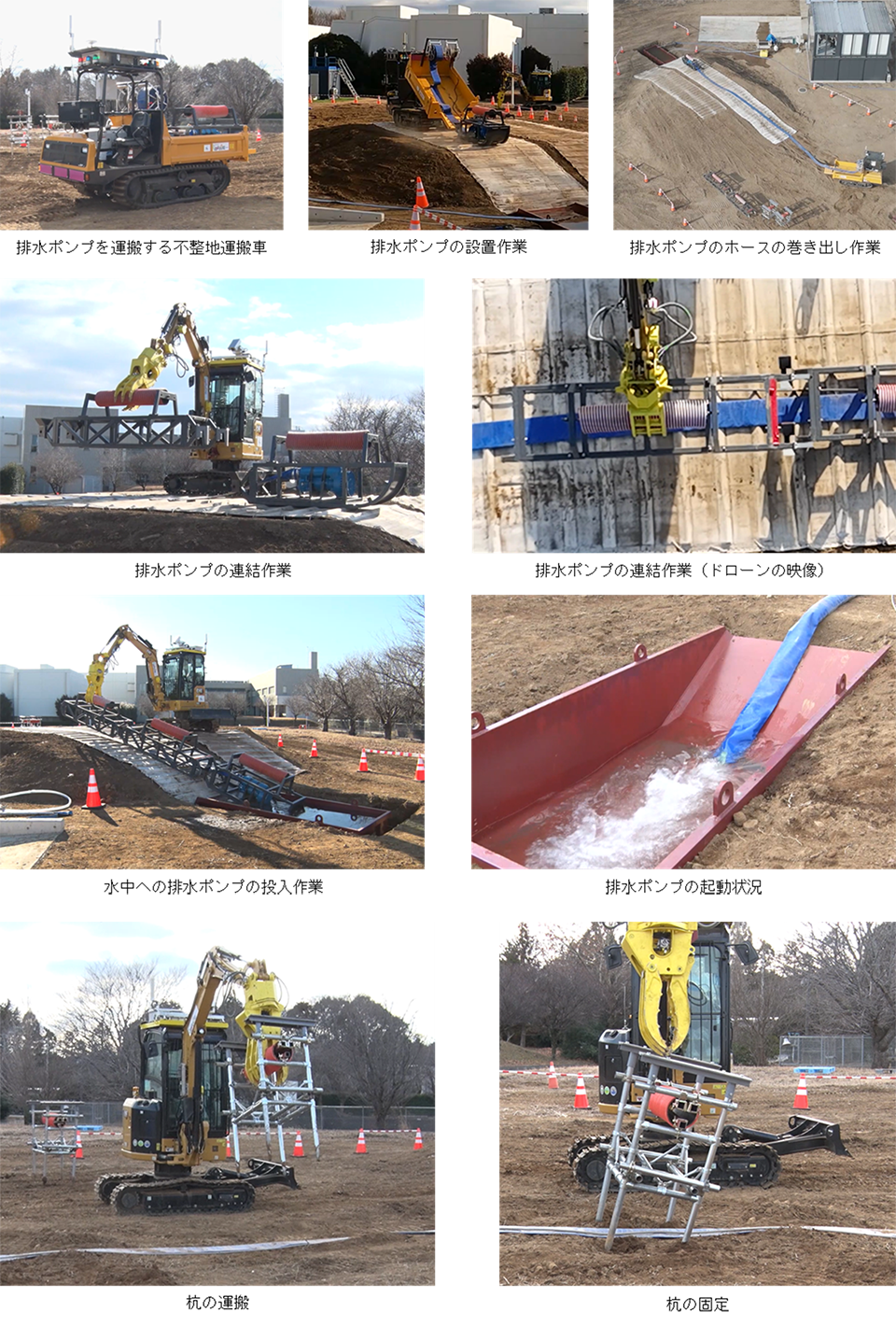
まず、河道閉塞の水際では、地盤が軟弱となるため、建設機械の履帯が沈み込み、走行できない状況になります。そこで、運搬が容易で、かつ建設機械の走行路を容易に確保することが可能な、走行路補強マットを開発しました。このマットは、合成繊維織物を素材とし、内部に塩ビ管を挿入した構造になっています。単位面積当たりの質量は7.42kg/m2で、敷鉄板の24分の1の軽さです。マットはロール状に巻いて不整地運搬車で運搬し、河道閉塞の水際でベッセルを上げて設置します。次に、油圧ショベルによって、ロール状のマットを展開して、建設機械の走行路を確保します。
ポンプの設置作業では、まず、不整地運搬車を遠隔操作して河道閉塞の水際まで走行させ、ベッセルを上げることでフレームに固定された排水ポンプを河道閉塞の水際へ設置します。次に、不整地運搬車が下流側へ走行することで、ホースおよび電源ケーブルを巻き出します。さらに、油圧ショベルの遠隔操作により、ポンプ本体を設置したフレームの後方に別のフレームを連結することで、小型の建設機械の作業半径を拡張します。
最後に、後方からポンプフレームを押し出して、水中に排水ポンプを設置します。
ポンプによる排水実施の際、通水直後にホースが暴れて他のポンプのホースと絡まり、破損した事例が報告されています。そのため、ホースの暴れを防止する目的で、ホースを固定するための杭を設置します。杭の設置では、油圧ショベルで杭を掴み、杭の頭を交互に打ち込みます。

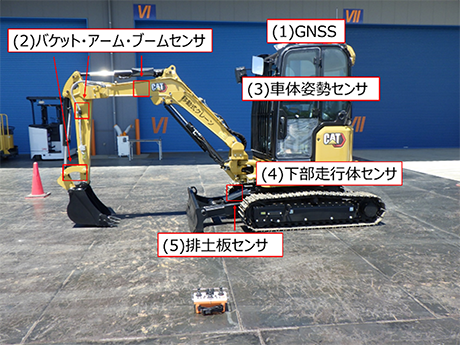
マシンガイダンスシステム
無人化施工においては、人が実際に搭乗しないので車両の姿勢(傾き)を直接的に把握することが困難となります。加えて、河道閉塞現場のような軟弱地盤においては,転倒しないように車両の姿勢を正確に把握する必要があります。このような課題に対し、建設機械の姿勢を正確に把握し、作業を支援するマシンガイダンスシステムが、大型油圧ショベルにおいてはすでに開発され、普及が進んでいるものの、小型油圧ショベルへの搭載例は少なく,その活用に向けたシステムは未整備であるのが現状でした。
そこで、本プロジェクトにおいて、小型油圧ショベルに対応したマシンガイダンスを開発しました。
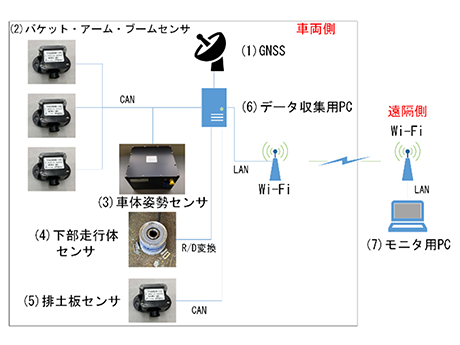
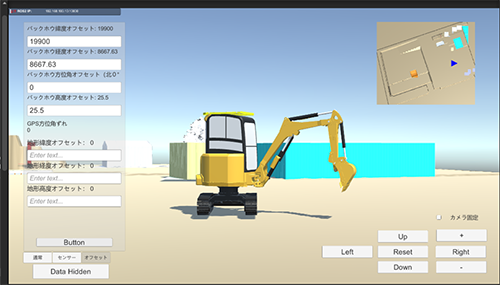
本システムは、GNSSやIMUといった高精度なセンサーを用いて、車両の姿勢を詳細に表現します。従来の大型油圧ショベル向けマシンガイダンスシステムが主に整地作業や掘削管理を目的としていたのに対し、本システムは災害復旧現場における小型油圧ショベルの運用に特化し、以下の固有の課題に対応しています。
1. 履帯方位角の正確な把握
半水中での作業を想定し、従来のシステムでは考慮されなかった履帯の方位角を正確に把握ができます。これにより、半水中での遠隔操作時におけるオペレータの直感的な前後進判断の誤りを排除し、安全な走行を支援します。
2. 排土板角度のリアルタイム把握
軟弱地盤上での車体安定性向上に不可欠な排土板の角度を正確に把握します。特に水中で排土板が見えなくなる状況下でも、その角度情報を提供することで、排土板をアンカーとして活用する際の安全かつ効率的な作業を実現します。これにより、小型油圧ショベルの無人化施工における安全性と作業効率が飛躍的に向上し、特に災害復旧現場での迅速な対応に貢献します。
ROSシステム
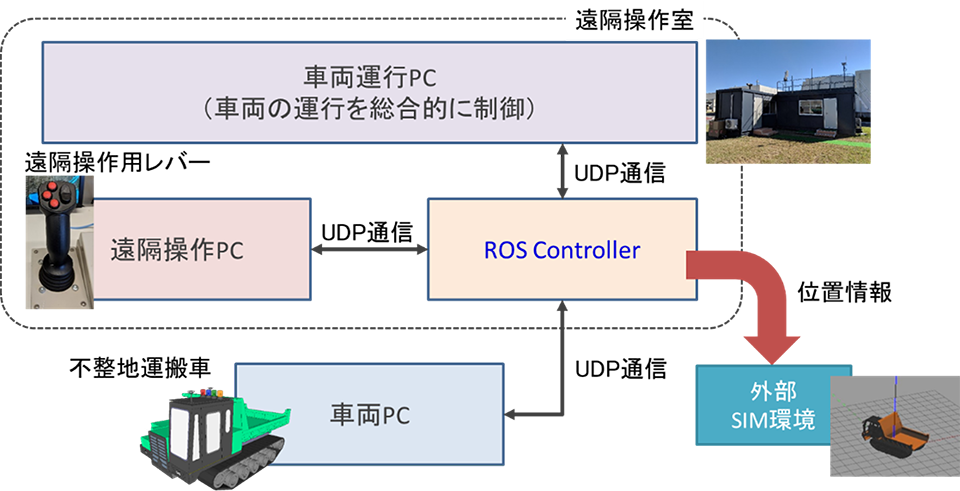
熊谷組が開発してきた自動走行システムで移動する不整地運搬車の位置情報について、ROS(Robot Operating System)システムを経由して他機関のシミュレーション空間に反映する開発を行いました。
車両運行PC(車両の運行を総合的に制御するPC)と遠隔操作PC(遠隔操作用レバー情報を転送するPC)、車両PC(車両側の制御PC)の間にROS Controller用のPCが介在します(図X)。不整地運搬車の運転中にGNSS(Global Navigation Satellite System)機器で取得されている位置情報を周期的に取得し、Odometry形式で外部のシミュレーション空間へと情報転送が行われます。
自動走行システムとUDP(User Datagram Protocol)通信で連携しつつ、最大で2台の不整地運搬車の動きをシミュレーション空間内で反映できることを確認しました。
3. 実証実験
今回の公開実験では、小型の建設機械の遠隔操作により、河道閉塞の模擬環境において、軟弱地盤上の走行路を確保するマットの設置と、溜池への排水ポンプを設置および排水作業ができることを実証します。
| 日時 | 2025年7月10日(木)13:00~16:00 |
|---|---|
| 場所 | 九州大学 伊都キャンパス (〒819-0395 福岡県福岡市西区元岡744) |
| 出席者 | 筑波大学 永谷圭司 (株)熊谷組 北原成郎、古川敦、畑本浩伸、飛鳥馬翼、久保田恭行 |
4. 今後の展開
本研究開発の成果によって、将来の河道閉塞の応急復旧作業を効率的に行うことができます。今後は、沈砂池などがある実際の環境で、このロボットシステムを適用し、社会実装の実現を目指します。
お問い合わせ先
本リリースについてのお問い合わせ先
株式会社熊谷組 経営戦略本部
広報部 電話:03-3235-8155
技術に関するお問い合わせ先
株式会社熊谷組 土木事業本部
土木技術統括部 土木DX推進部