- プレスリリース
水中施工に進化をもたらす新技術!高精度水中測位システムとマシンガイダンスを統合した水中遠隔操作システム「AquaMarionette®(アクアマリオネット)」が完成
2025年03月13日
株式会社熊谷組(本社:東京都新宿区、代表取締役社長:上田 真)は、水中の無人化施工に向けた、世界初の音速自動補正機能を有する高精度水中測位システムをマシンガイダンスと統合し、水中バックホウの遠隔操作システム「アクアマリオネット」を完成させました。
水中超音波の多重反射が発生しやすい水深4.5m(広さ5m×8m)の狭隘な屋外実験水槽においても、頑強な水中測位アルゴリズムにより、精度数cmの高精度な水中遠隔制御を実証しました。
今後は、あらゆる水中土木工事に活用していきます。
1. 目的・概要
河川・海洋・港湾・ダムでの施工は、安全性確保・効率化のため、高水圧・視界不良の水中作業を避けた施工を実施するのが一般的です。しかしながら近年ではダム放水口の堆積土砂撤去などといった老朽化インフラの更新や災害による被災施設の復旧など、水中での精密な施工が必要なケースが増加しています。
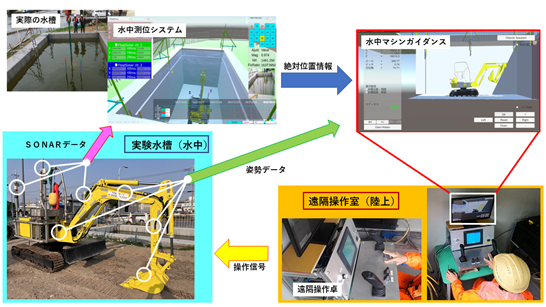
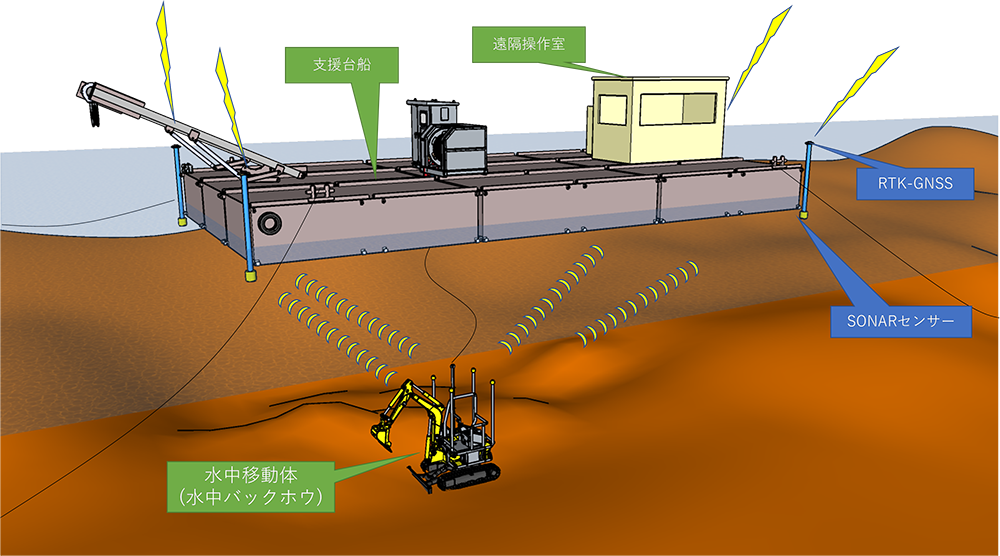
これらの精密水中施工を実現するためには、小型水中バックホウをはじめとした水中施工機械での施工が不可欠となりますが、目視が不可能な水中での施工を実現するためには、水中遠隔操作が可能な制御系のハードウェア開発、これらの施工機械の姿勢を各種センサー計測値に基づき描画してオペレータに情報提供するマシンガイダンスシステム、そして既存のセンサーでは実現不可能であった施工機械の絶対位置を高精度に計測する水中測位システムが必要となります。
2. 実証試験
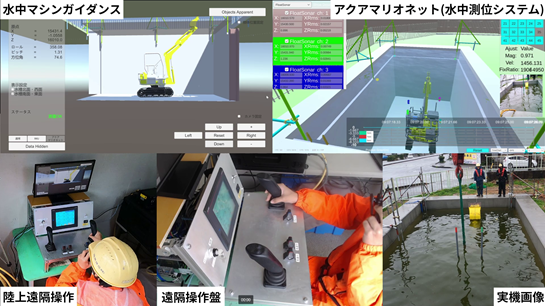
高精度水中測位システムによる水中測位データと、バックホウに設置した各種センサーによる姿勢角のデータを統合した水中マシンガイダンスシステム「アクアマリオネット」による水中バックホウの遠隔操作実証試験を実施しました。
実証試験は水深4.5m(広さ5m×8m)の屋外水槽に3tクラスの小型水中バックホウを沈め、目視できないという条件下で遠隔操作による水中バックホウの操作を行いました。
バックホウのオペレータは、水槽から離れた場所で水中マシンガイダンスシステムにより描画される水中バックホウの挙動を確認しながら、遠隔操作化の改造を行った水中バックホウの操作卓レバーで、機械を操作します。
水中超音波の多重反射が発生しやすい厳しい条件下の狭隘な水槽においても、頑強な水中測位アルゴリズムにより、水中遠隔施工の高精度な制御が可能であるということが実証でき、このシステムが通常の水域においても十分な施工能力がある事を確認できました。
水中バックホウの遠隔操作化は、極東建設株式会社の協力で実現しました。

3. 今後の展開
今回、狭隘な屋外水槽での環境下でも、安定した水中遠隔施工が可能である事を実証でき、水中リニューアル工事にロボット技術を高精度に活用できることを実証できました。
高水圧・視界不良の水中での施工を潜水士無しで実施する事が可能となるため、河川・海洋・港湾・ダムでの水象条件によらずに利用可能な高精度の遠隔操作・自動化水中施工システムの実現が可能となります。
「アクアマリオネット」は水中施工の効率性や安全性を向上させ、様々なプロジェクトにおいて、新たな可能性を広げていきます。
お問い合わせ先
本リリースについてのお問い合わせ先
株式会社熊谷組 広報部広報グループ
電話:03-3235-8155
技術に関するお問い合わせ先
株式会社熊谷組 土木事業本部土木DX推進部
電話:03-3235-8653