- プレスリリース
水中作業のICT技術 水中無人化施工技術の開発―高精度水中測位システム「AquaMarionette(アクアマリオネット)」の開発―
2023年10月10日
株式会社熊谷組(代表取締役社長 櫻野 泰則)は、水中の無人化施工に向けた水中遠隔操作のための高精度水中測位システム「AquaMarionette(アクアマリオネット)」を開発しました。水中での無人化施工は、視認性が確保できない水中において、施工機械の絶対位置・姿勢の計測が不可欠です。常時動揺している水上浮体から水中の移動体の絶対座標・姿勢をリアルタイムに計測・解析するシステムを開発し、屋外水槽を用いた基礎試験により5cm以内の精度を実証し、水中無人化施工への適用が可能であることを確認しました。
今後は、小型水中バックホウの遠隔操作に関するハードウェア・ソフトウェアを充実させ、水中測位システムを連動させる事により、目視が困難な水中での建設機械の操作が潜水士無しで施工できる、水中バックホウの無人化施工を目指して開発を進めます。
1. 目的
河川・海洋・港湾・ダムでの施工は、安全性確保・効率化のため、高水圧・視界不良の水中作業を避けた施工を実施するのが一般的です。しかしながら近年では老朽化インフラの更新や災害による被災施設の復旧など、水中での精密な施工が必要なケースが増加しています。
これらの精密水中施工を実現するためには、小型水中バックホウでの施工が不可欠となっています。現在の小型水中バックホウは、潜水士の搭乗操作が必要となっていますが、高水圧下での潜水士作業は肉体的負担と安全性に問題があります。また、水中バックホウの絶対位置を高精度に取得できるシステムがないため、陸上でのマシンガイダンスのように重機の姿勢および周辺地形を把握することが困難となっています。
水中遠隔操作のための高精度水中測位システムを開発する事により、高水圧・視界不良の水中での施工を潜水士無しで実施する事を目的としています。
2. システム構成
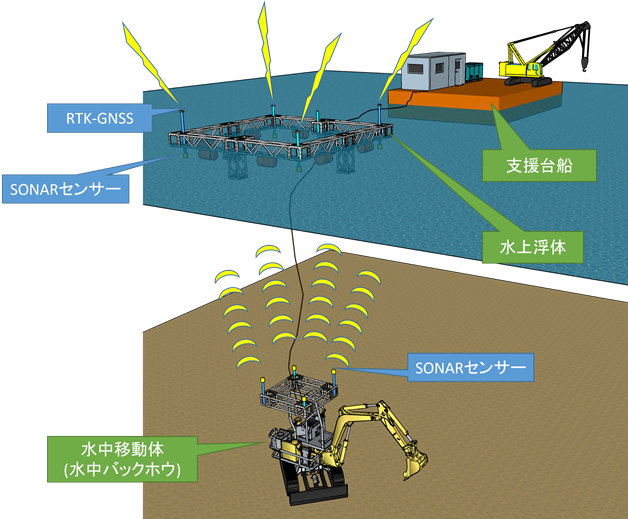
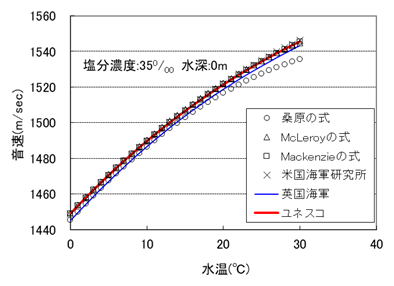
高精度水中測位システム「アクアマリオネット」は、熊谷組で保有している大水深沈埋函の沈設誘導システムの原理を応用し、水上浮体の気中4隅にGNSSアンテナおよび水中4隅にSONARセンサーを配置し、水中移動体(バックホウ等)の上部4隅にSONARセンサーを配置します。水上浮体の絶対位置と姿勢をGNSSにより計測し、同時に水上浮体と水中移動体に有線接続したSONARセンサー間の距離を計測する事により、水中移動体の絶対位置と姿勢を高精度かつリアルタイムに計測する事が可能となっています。水中において電磁波は減衰が大きいため、水中での通信には音波を利用します。高精度水中測位システム「アクアマリオネット」も音波を使用し、音波の到達時間に音速を乗じて距離を算出していますが、水中の音速は水温・塩分濃度・水深により変化します。特に水温による影響が大きく、距離10mの測距では水温1℃の差で1.8cmの差異が生じるため、精密な測位を行うためには音速の補正が必要となります。音速の鉛直分布や時間変化を考慮した測距のための音速計測は非常に困難でありますが、高精度水中測位システム「アクアマリオネット」では、GNSSおよびSONARの観測値より条件付観測方程式により水中移動体の絶対位置・姿勢と、音速の最確値を算出しています。このため音速の計測も不要で、高精度の水中測位が可能となっています。

3. 実証試験
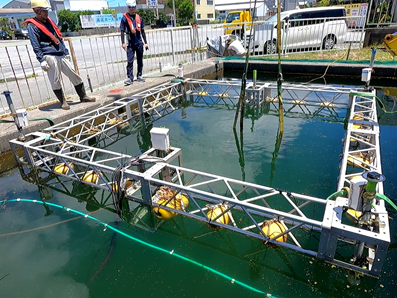
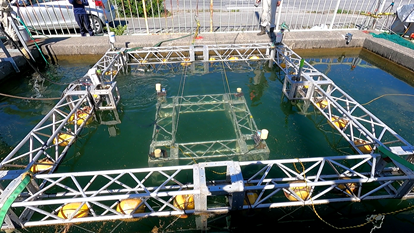
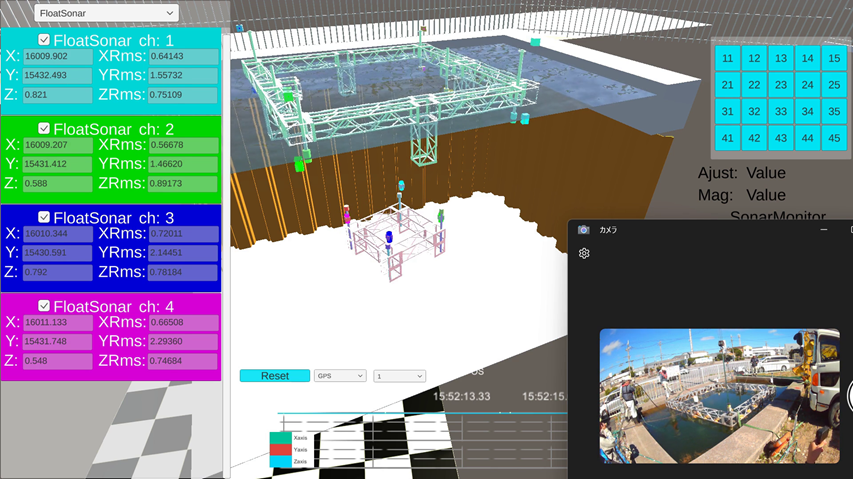
システムの検証は屋外実験水槽で実施しました。水深4.5m(広さ5m×8m)の屋外水槽に水上浮体を模擬したフレームを浮かべ、水中移動体を模擬したフレームを水槽内に沈め、動揺する水上浮体に取り付けたGNSSおよびSONARセンサーを用い、水中移動体のSONARセンサー位置を高精度水中測位システム「アクアマリオネット」により計測しました。システムにより位置計測を行った水中移動体の模擬フレームを残置し、実験水槽内を排水したのちにTS(トータルステーション)により絶対座標を計測した結果、TSとの計測較差3cm以下を確認しました。
水中移動体の絶対座標および姿勢をリアルタイムに計測でき、前述のとおり絶対座標の精度も良好であることを確認できました。


4. 今後の展開
今後は、小型水中バックホウの遠隔操作に関するハードウェア・ソフトウェアを充実させ、水中測位システムを連動させる事により、水中バックホウの無人化施工の実用化を進めます。
高水圧・視界不良の水中での施工を潜水士無しで実施する事が可能となるため、河川・海洋・港湾・ダムでの水象条件によらずに利用可能な高精度の遠隔操作・自動化水中施工システムの実現が可能となります。
お問い合わせ先
[本リリースについてのお問い合わせ先]
株式会社熊谷組 広報部 広報グループ
電話 03-3235-8155
[技術に関するお問合せ先]
株式会社熊谷組 土木事業本部 土木DX推進部
電話 03-3235-8653