- プレスリリース
熊谷組、自動転圧作業アシスト技術を活用した振動ローラの実証実験を実施
2022年12月26日
株式会社熊谷組(本社:東京都新宿区、代表取締役社長:櫻野泰則)は、弊社施工現場(大切畑地区県営農地等災害復旧事業第1号工事)において自動で転圧作業をアシストする技術「Cat® Command for Compaction」※1を搭載した振動ローラによる実証実験を実施しました。
今回の実験では、試験エリア内で規定転圧回数6回の転圧作業を従来の有人作業(自動制御なし)と比較いたしました。工区全体の面積を100%とする場合、規定6回で転圧された転圧範囲内の面積は、自動制御なしでは40%、自動制御ありでは60%で、1.5倍に向上できました。
今後は施工現場への本格導入に向けた取り組みを加速していきます。
- Cat® Command for Compactionは、Catterpillar社の製品です。
1. 背景
現在、建設現場において熟練オペレータの高齢化、人手不足が顕著になりつつあることは建設業界全体の大きな課題として取り上げられています。そのため、重機の遠隔化・自動化による施工は、一人当たりの生産性向上に寄与する技術として、期待されています。
2. システム概要
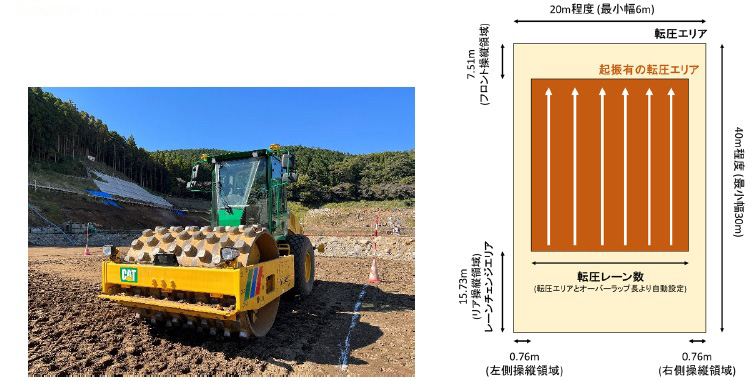
Cat®Command for Compactionは振動ローラの転圧作業の操作をアシストする技術で、オペレータが基本的に搭乗した状態で、走行・ステアリング・起振を自動制御するシステムです。振動ローラには、GNSSアンテナや補正データ受信用の無線機、障害物衝突防止用レーダが搭載されています。
自動転圧作業アシスト技術による転圧作業として、まずは転圧エリアの設定の ため、振動ローラを4隅に移動させ、4隅の座標を記録します。つぎに転圧条件として以下の4つを車両内に搭載のディスプレイより設定します。
- 転圧回数
- 速度
- オーバーラップ
- 起振の有無
転圧エリア、転圧条件を設定すると、転圧開始位置、締固め方向、自動転圧エリアが表示されます。振動ローラを転圧開始ポイントに移動することで自動制御を開始することが可能になります。
3. 実証実験
実証実験は、大切畑地区県営農地等災害復旧事業第1号工事にて転圧用の試験エリアを造成し、同一の転圧エリアにて自動制御ありと自動制御なしで実証実験を実施しました(写真-2)。

4. 転圧作業の効率性
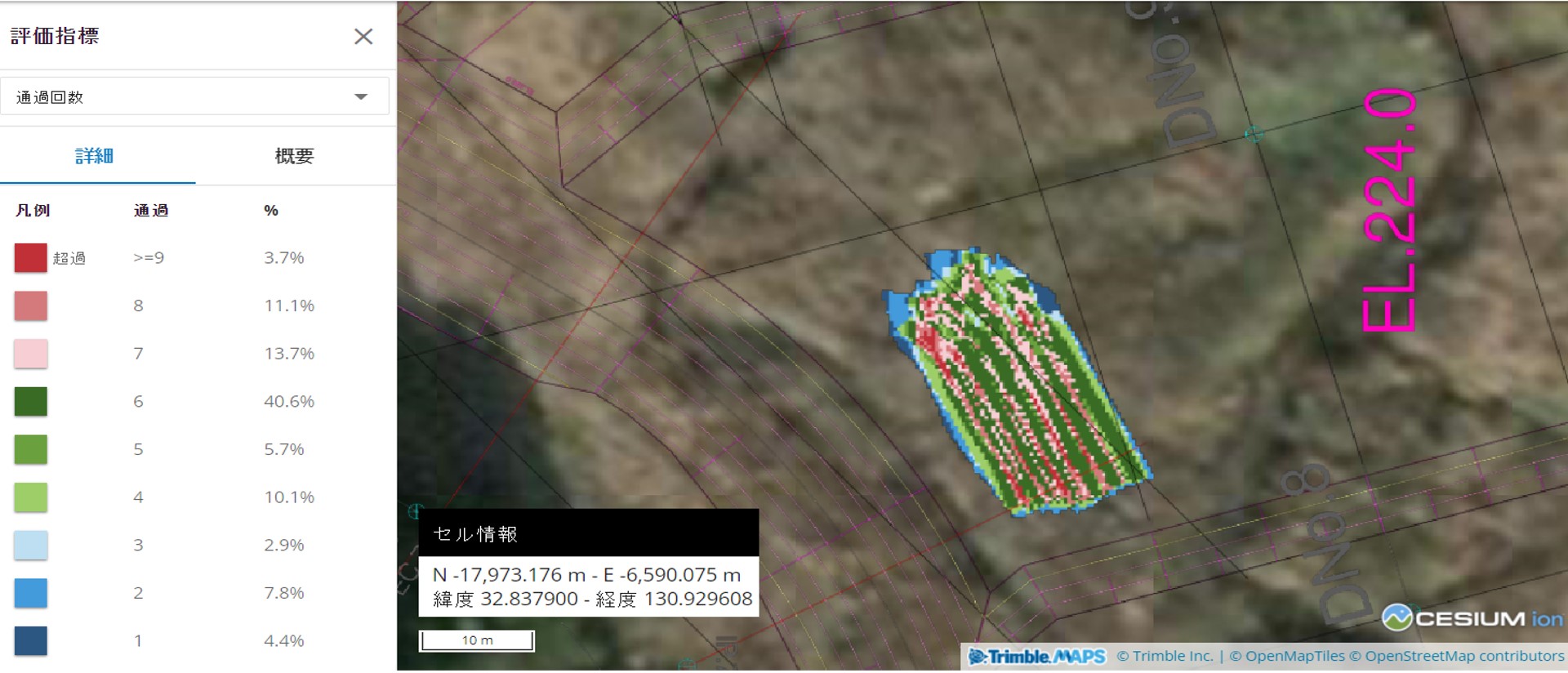
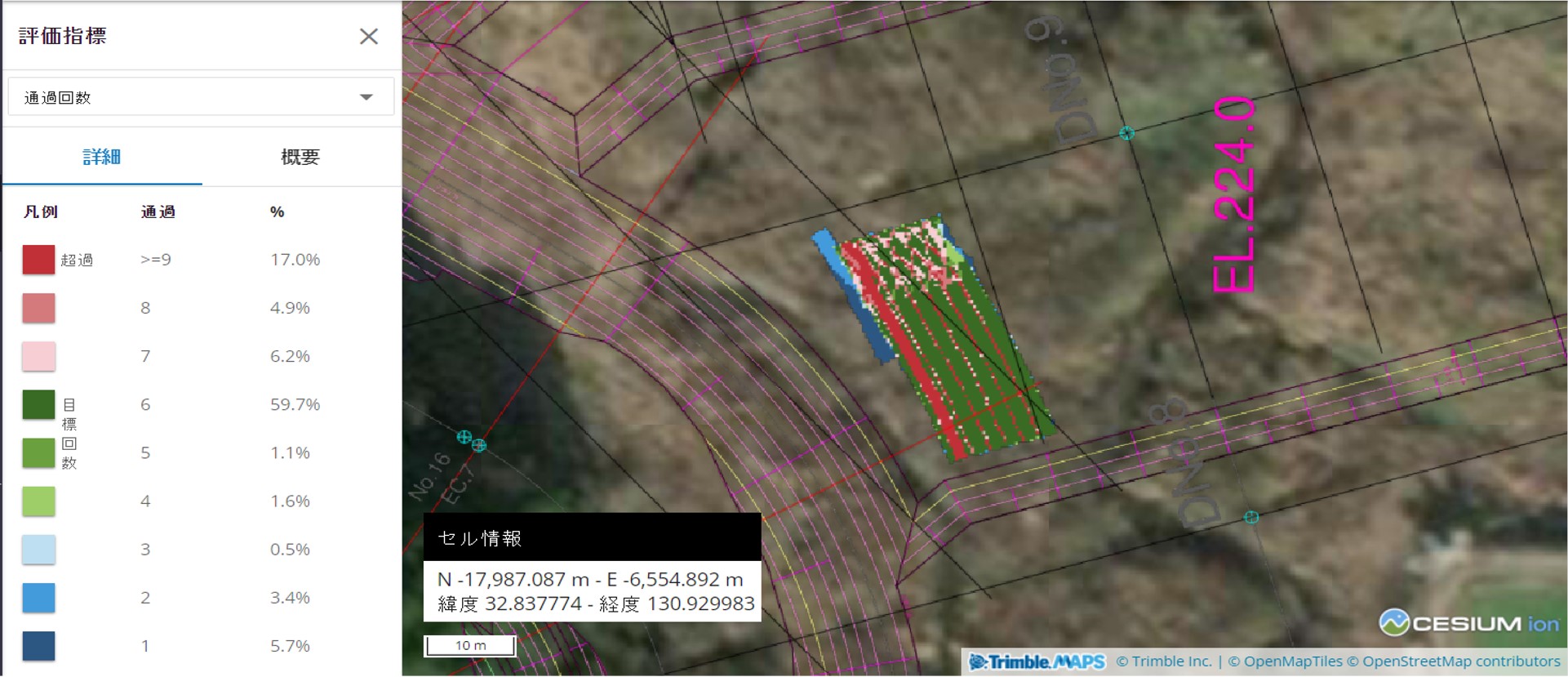
振動ローラの転圧軌跡を表示する施工履歴データ管理クラウドサービスにより、転圧回数全体を100%とした場合に各転圧回数の割合をカラーで示すことが可能です。これにより、自動制御なしでは6回転圧が40.6%(図-2)に対して、自動制御ありでは6回転圧が59.7%(図-3)という結果が得られました。
このことから自動制御によって、正確に転圧できるエリアが約1.5倍向上していることからCat® Command for Compactionの有効性を確認できました。
5. 今後の展開
建設機械の自動化や自律化は、i-Constructionの導入が進む中で、今後大きく進展することが期待されています。今後は、熊谷組が進めている無人化施工 の現場へ導入し、複数台の重機との連携を可能にしていきます。
お問い合わせ先
本リリースについてのお問い合わせ
株式会社熊谷組 コーポレートコミュニケーション部 広報グループ
電話 03-3235-8155
技術に関するお問い合わせ
株式会社熊谷組 土木事業本部 ICT推進室
電話 03-3235-8627